Table of Contents
Magnetic dipole moment
| Stan Zurek, Magnetic dipole moment, Encyclopedia Magnetica, https://e-magnetica.pl/doku.php/magnetic_dipole_moment, {updated: 2025/10/19 21:40} |
Magnetic dipole moment or magnetic moment (often denoted by letter m or μ)1)2) - a vector quantifying the magnetic property of a current loop, equal to the product of the electrical current and the loop area. The direction of magnetic moment $\vec m$ is defined by the right-hand rule and is perpendicular to the plane of the loop.3)
This convention defines the polarity of magnetic poles, with the sense of the arrow denoting magnetic north pole.4)
Magnetic dipoles are used as the basis for the definition of magnetisation M (response of matter to being magnetised).

S. Zurek, E-Magnetica.pl, CC-BY-4.0
The magnetic dipole moment is a product of the amplitude of the current $I$ and the area $A$ of the loop: 5)
| $$ m = I · A $$ | (A·m²) |
The vector $\vec m$ is oriented in the same direction as the unit vector $\vec a$, normal to the surface $A$:
| $$ \vec m = I · A · \vec a $$ | (A·m²) |
Magnetic moment is a pseudovector6) and a force or torque acts on the “centre of mass” of the dipole.7)
The current loop is known as “magnetic dipole” because of the similarity of the character of the field to that of an electric dipole. In some cases, a similar logic can be applied for analysis of the fields and a magnetic dipole can be represented as a field of two hypothetical separated magnetic monopoles:8)
| $$ m = p · l $$ | (A·m²) |
where: $p$ - strength of magnetic monopoles (A·m), $l$ - distance between the poles (m).
| → → → Helpful page? Support us! → → → | PayPal | ← ← ← Help us with just $0.10 per month? Come on…  ← ← ← |
From theoretical viewpoint, the magnitude of magnetic moment, as a product of current and area, can remain constant when the area is shrinking and the current is increasing. In practice, when analysing atomic behaviour, at sufficiently large distance from the dipole the magnetic field is independent of the shape of the dipole, and the magnetic field distribution is identical to an infinitesimal, point-like dipole (see the animation below).9)



by Geek3, CC-BY-SA-3.0
Magnetic field of a dipole
For distance much larger than the radius r of the current loop the magnetic field does not depend on the shape of the current loop, and can be calculated in spherical coordinates (for distance R and angle θ, with the unit vectors $\hat{R}$ and $\hat{θ}$):10)11)
| $$ \vec{H} = \frac{|\vec m|}{μ_0·R^3} · \left( 2·\text{cos} (θ) · \hat{R} + \text{sin} (θ) · \hat{θ} \right) $$ | (T) |
Magnetic dipole in magnetic field
Torque on dipole

S. Zurek, E-Magnetica.pl, CC-BY-4.0
If the current loop is exposed to magnetic field, in the form of magnetic flux density (vector of B) then the magnetic moment allows calculation of the torque $\tau$, which will tend to align the current loop parallel to the applied B. This torque has an energy associated with it:12)
| $$ \vec τ = \vec m \times \vec B $$ | (N·m) = (J) |
Energy of dipole
The energy $U$ associated with a magnetic dipole moment m placed in magnetic field B is:13)14)15)
| $$ U = - \vec m · \vec B = - m · B · \text{cos} θ $$ | (J) |

S. Zurek, E-Magnetica.pl, CC-BY-4.0
The change in energy required to flip the dipole from the lowest energy position (magnetic moment parallel with the field) to the highest energy position (magnetic moment anti-parallel with the field) is:17)
| $$ ΔU = 2 · m · B $$ | (J) |
Force on single dipole

S. Zurek, E-Magnetica.pl, CC-BY-4.0
The external magnetic field exerts the magnetic force on each infinitesimal part of the current loop. In a uniform parallel field the forces act only radially, so the net force on the dipole is zero.
However, if the current loop is placed in a gradient of flux density B then the magnetic dipole moment allows calculation of the force F which will attract or repel it, depending on the mutual alignment of the vectors of B and m.
For a general three-dimensional case:19)
| $$ \vec F = \nabla ( \vec m · \vec B ) $$ | (N) |
where: $\nabla$ is the nabla operator.
The calculation simplified for a single axis x is:20)
| $$ F = m· \frac{d B}{d x} $$ | (N) |
S. Zurek, E-Magnetica.pl, CC-BY-4.0
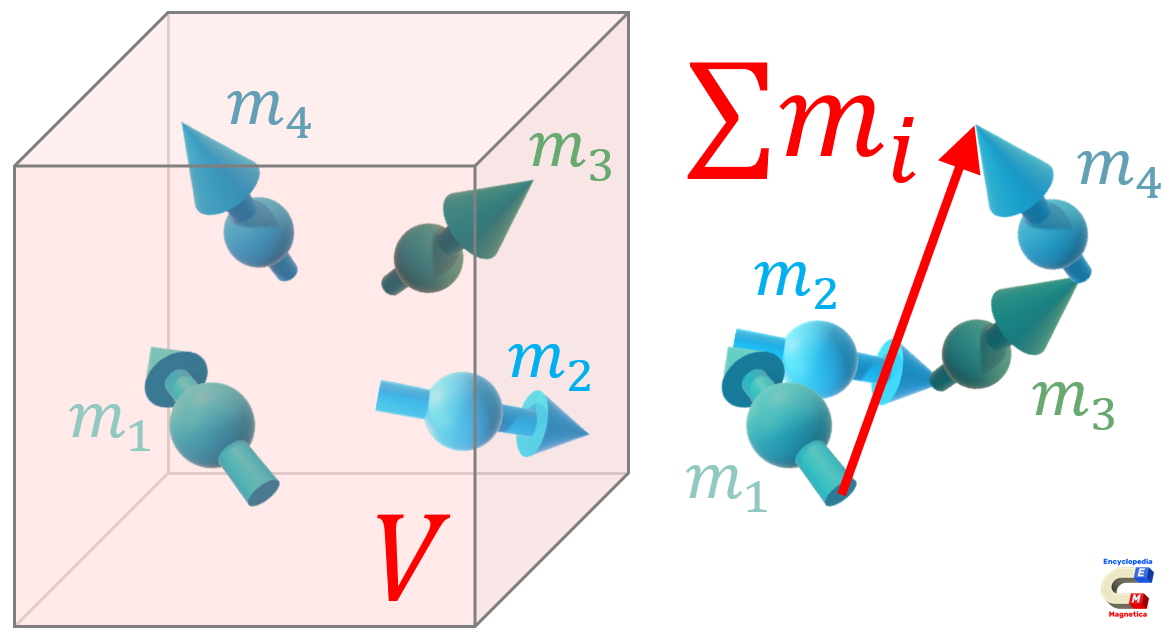
Magnetisation M is a vector sum of magnetic moments per unit volume V of material, so $M = \sum{m} / V$, from which the sum of magnetic moments is $\sum{m} = M·V$. Therefore, knowing magnetisation of the sample and its volume it is possible to calculate the force acting on it due to the gradient of the applied magnetic field B or H, which in vacuum gives:21)
| $$ F = M·V· \frac{d B}{d x} = μ_0·M·V· \frac{d H}{d x} = J·V· \frac{d H}{d x} $$ | (N) |
| where: $M$ - magnetisation (A/m) of the sample, $V$ - volume (m3) of the sample, $\frac{d B}{d x}$ - gradient of applied external magnetic flux density (T/m), $\frac{d H}{d x}$ - gradient of applied external magnetic field strength (A/m2) $μ_0$ - permeability of vacuum (H/m), $J$ - magnetic polarisation (T) of the sample | |
Force between two dipoles
 Note: some equations here might be expressed either in the CGS or SI format (as in the cited references). Note: some equations here might be expressed either in the CGS or SI format (as in the cited references). |
The force exerted by a current loop, or a magnetic dipole a on b, separated by a distance R much larger than their radius, can be calculated by solving the following double integral:22)
| $$ \vec F_{ab} = \frac{μ_0}{4π}·I_a · I_b · \oint_a \oint_b \frac{\vec d_b \times (\vec d_a \times \vec R) }{R^3} $$ | (N) |
where: $I_a$ and $I_b$ - currents in loop a and b, respectively (A), $\vec d_a$ and $\vec d_b$ - infinitesimal vector of the paths a and b, respectively (m), $\vec R$ - vector from $\vec d_a$ to $\vec d_b$ (m).

S. Zurek, E-Magnetica.pl, CC-BY-4.0
| $$ \vec F_{ab} = \frac{3 · μ_0 · m_a · m_b}{4 · π · \, r^4} \Big( \hat r ( \hat m_a · \hat m_b) + \hat m_a · (\hat r · \hat m_b) + \hat m_b · ( \hat r· \hat m_a ) - 5 \hat r · (\hat r · \hat m_a)·(\hat r · \hat m_b) \Big) $$ | (N) |
| or equivalently: $$ \vec F_{ab} = \frac{3 · μ_0}{4 ·π ·r^4} \Big( (\hat r × \hat m_a) × \hat m_b + (\hat r × \hat m_b) × \hat m_a - 2 \hat r·(\vec m_a ·\vec m_b) + 5 \hat r · (\hat r × \vec m_a)·(\hat r × \vec m_b) \Big) $$ |
where: $m_a$ and $m_b$ are the magnetic dipole moments (A·m2), $\hat m_a$ and $\hat m_b$ are the unit vectors in directions of the dipole vectors, $\hat r$ is the unit vector along the direction from the centre of the a dipole to the centre of b dipole, $r$ is the distance between the centre of the dipoles (m), $\vec m_a$ and $\vec m_b$ are the dipole moment vectors (A·m2).
If the two moments are aligned on the same axis, then all the terms with vector cross products are eliminated, the force acts only on the axis, and the equations simplifies to:25)
| $$ \vec F_{ab} = \frac{3 · μ_0 · m_a · m_b}{2 · π · r^4} $$ | (N) |
Torque between two dipoles
The magnetic field generated by the dipole a at the location of b is:26)
| $$ \vec B_{ab} = \frac{μ_0}{4π \, r^5}· \Big( 3·(\vec m_a · \vec r)· \vec r - r^2 · \vec m_a \Big) $$ | (T) |
The torque $\vec τ_{ab}$ exerted on a dipole b by magnetic field generated by the dipole a, separated by a distance R much larger than their radius is:27)
| $$ \vec τ_{ab} = \vec m_b \times \vec B_{ab} $$ | (N·m) |
which when evaluated gives:
| $$ \vec τ_{ab} = \frac{μ_0}{4 π \, r^5} \Big( 3 \vec m_b × (\vec m_a · \vec r) · \vec r - r^2 · (\vec m_b × \vec m_a) \Big) $$ | (N·m) |
| or equivalently: $$ \vec τ_{ab} = \frac{μ_0 · m_a · m_b}{4 π \, r^3} \Big( 3 · ( \hat m_a · \hat r)· (\hat m_b × \hat r) + (\hat m_a × \hat m_b) \Big) $$ | |
where: $m_a$ and $m_b$ are the magnetic dipole moments (A·m2), $\hat m_a$ and $\hat m_b$ are the unit vectors in directions of the dipole vectors, $\hat r$ is the unit vector along the direction from the centre of the a dipole to the centre of b dipole, $r$ is the distance between the centre of the dipoles (m), $\vec m_a$ and $\vec m_b$ are the dipole moment vectors (A·m2).
In a general case, the torque exerted on b from a is not equal to the torque on a from b, but the total angular momentum of the system is conserved:28)
| $$ τ_{ab} \neq - τ_{ba} $$ | (N) |
Magnetic moment of elementary particles

S. Zurek, E-Magnetica.pl, CC-BY-4.0
Sub-atomic particles such as electron, proton and neutron possess magnetic moments, which are inversely proportional to their masses, so the magnetic moment of electron is larger, because its mass is smaller.
There are two contributions to electron magnetic moment: the orbital magnetic moment (whose value is orbit-dependent 30)) and the spin magnetic moment (often expressed as a ratio to the constant Bohr magneton).31)
| Magnetic moment (A·m2 ≡ J/T) | |
| Proton 32) | 1.411 × 10−26 |
| Neutron 33) | -9.662 × 10-27 |
| Electron 34) | −9.285 × 10−24 |
| Bohr magneton 35) | 9.274 × 10−24 |
The magnetic properties of matter are dictated mostly by the magnetic moments of the electrons.36) Very strong magnetic effects (which are utilised in electromagnets, electric motors, transformers, etc.) require sufficiently dense packing of atoms in the matter, so the the spin-spin interactions can produce their long-range ordering, required for example for emergence of ferromagnetism.
Measurement of magnetic moment
Helmholtz coil can be also used for sensing of the magnetic field, rather than for its generation.

S. Zurek, E-Magnetica.pl, CC-BY-4.0
A commonly used configuration is to employ the Helmholtz coil to measure the magnetisation of permanent magnets, by means of detecting the magnetic moment.37) If the magnet size is “small” compared to the Helmholtz coil, then such magnet can be treated as a point-like magnetic dipole moment, for which at large distance the magnetic field does not depend on the shape of the magnetic dipole, but only on its magnitude and direction.38)
The magnet to be measured is placed at the centre of the coil, such that its axis of magnetisation coincides with the axis of the Helmholtz coil, and then the magnet is withdrawn along the axis (such method is sometimes referred to as the ballistic method), as defined by the international standard IEC 60404-14.39) It is also possible to perform the measurement by withdrawing the magnet towards the side (between the coils), rather than along the axis.40)
During the withdrawal, a voltage is induced in the Helmholtz coil due to changes of the magnetic flux, and this can be detected by means of a fluxmeter (integrating the voltage by an analogue or ditigal methods).
The flux can be related to the magnetic moment of the magnet, which in turn it can be related to the magnetic polarisation J or magnetisation M of the magnet. The measurements are less accurate as compared to a hysteresisgraph method, but they are relatively easy to make, useful and reliable, with equipment which is less costly.41)
A Helmholtz coil with fixed dimensions has a constant factor relating the current in the coil and the magnetic field $H_0$ it generates at its centre (x=0). This can be calculated as the ratio $k_H = H_0/I$, which for an ideal Helmholtz coil (infinitely thin, spaced by a distance equal to the radius, see also equation (1)), can be derived as in eq. (11), so there is a proportionality of 0.71554 (which is used by its reciprocal 1/kH = 1.39754, as in eq. (12)).42)43)44)
The measurement can be also performed by rotating the magnet (so that the locations of its poles N and S are swapped), but this induces twice the voltage, so the final result must be divided by a factor of 2.45)
| (11) Helmholtz coil constant kH | |
|---|---|
| $$ k_H = \frac{H_0}{I} ≈ 0.71554·\frac{N_{each}}{r} $$ | ( (A/m) / A) ≡ (1/m) |
| where: $H_0$ - magnetic field strength (A/m) at the centre of the Helmholtz coil, $I$ - current (A), $N_{each}$ - number of turns in each half-coil (unitless), $r$ - radius of the Helmholtz coil (m) | |
| (12) Measurement of magnetic moment and magnetic polarisation J or magnetisation M 46)47)48) | ||
|---|---|---|
| (12a) | $$ J = \frac{j}{V_m} = \frac{\int{V dt}}{k_H·V_m} = \frac{ΔΦ}{k_H·V_m} $$ | (T) |
| (12b) | $$ M = \frac{j}{μ_0·V_m} = \frac{\int{V dt}}{k_H·μ_0·V_m} = \frac{ΔΦ}{k_H·μ_0·V_m} $$ | (A/m) |
| where: $J$ - magnetic polarisation (T) of the magnet, $j$ - magnetic dipole moment related to polarisation expressed in (Wb·m), $V_m$ - volume (m3) of the magnet, $\int{V dt}$ - integral (V·s) of the induced voltage $V$ (V), $ΔΦ$ - change of magnetic flux from the central position (zero) to “infinity” (sufficiently far away), $k_H$ - Helmholtz coil constant (1/m). | ||
Calculator of magnetic moment emu (convert between CGS and SI)
| | Stan Zurek, Calculator of magnetic moment emu (convert between CGS and SI), Encyclopedia Magnetica, https://www.e-magnetica.pl/doku.php/calculator/emu_cgs_si, {accessed 2025-11-04} |
Conversion of emu (electromagnetic unit of magnetic moment) from CGS to SI units requires the following numerical scaling:
| Conversion of magnetic moment emu from CGS to SI | |
|---|---|
| Source: [1] Edward P. Furlani, Permanent magnet and electromechanical devices, Academic Press, London, 2021, ISBN 0122699513 | |
| [1], Appendix D, p. 511 | $$ 1 \bigg( emu = \frac{ \text{erg} } { \text{Oe} } \bigg)_{CGS} = 4·π·10^{-10} \bigg( \text{Wb·m} \bigg)_{SI} $$ |
Note: emu converted from CGS to SI still represents the magnetic dipole moment m but additionally multiplied by the absolute permeability of vacuum μ0 (which is reflected in the resulting SI units).
| → → → Helpful page? Support us! → → → | PayPal | ← ← ← Help us with just $0.10 per month? Come on… ← ← ← |
See also
References