Table of Contents
Confusion between B and H
| Stan Zurek, Confusion between B and H, Encyclopedia Magnetica, https://e-magnetica.pl/doku.php/confusion_between_b_and_h |
Confusion between B and H - a problem recognised in the literature regarding magnetic field and the confusion between the quantities, meaning and physical units of magnetic flux density B and magnetic field strength H.1)2)3)4)5)

S. Zurek, E-Magnetica.pl, CC-BY-4.0
Both B and H are strictly defined in terms of measurement units as well as their physical meaning.6)7) Only the names are problematic, not the units or mathematical calculations.8)
The confusion arises because different authors have various scientific background, so different emphasis is put on different aspects of the analysis, calculation, and experimental approach.
Most people who use the mks units have chosen to use a different definition of H. Calling their field H′ (of course, they still call it H without the prime) […]
We think it is more convenient for H to have the same units as B — rather than the units of M, as H′ does. […] There is one more horrible thing. Many people who use our definition of H have decided to call the units of H and B by different names! […] So, in many books you will find graphs with B plotted in gauss and H in oersteds. They are really the same unit — 10−4 of the mks unit. We have summarized the confusion about magnetic units in […]
Two broad approaches can be identified:
1. In theoretical physics - magnetic field B is regarded as “fundamental”, and H is “useful” but “has no name”10)11)12) Matter is treated at both the microscopic level (B in the vacuum between the atoms) as well as macroscopic (M, H).
2. In engineering - the “fundamental” magnetic field is H;13) electric current I generates the magnetic field strength H, and flux density B is a response of the medium magnetised by H. The engineering approach follows the naming convention defined in the SI system of units.14) All the quantities are measurable at the macroscopic level.
There are also two more quantities, closely related to H and B: magnetisation M (measured in A/m) and magnetic polarisation J (measured in T).15)16)17)
| → → → Helpful page? Support us! → → → | PayPal | ← ← ← Help us with just $0.10 per month? Come on…  ← ← ← |
Reasons for the confusion
There are several reasons contributing to the confusion:
- some terminology dates back to before understanding of electromagnetism was developed
- some progress was made by experimentalists and some by theoreticians, with differing interpretation of various aspects
- international systems of units:
- the CGS system of units (centimetre-gram-second, CGS) introduced one set of terminology
- the SI system of units (metre-kilometre-second, MKS) changed some of the names
- the SI system was adopted legally by majority of countries, but some countries still continue to use CGS, so both types of terminology continue to appear in technical publications and standards for magnetic measurements
- books on theoretical physics insist on using different naming convention from the widely adopted SI system
- some naming conventions have been used for many years in some disciplines, and switching over to the SI naming is still not adopted.
- in vacuum B and H are exactly equivalent, proportional by a constant multiplier ($μ_0$), so one or the other quantity is used depending on convenience of a given approach
- in non-magnetic materials B and H behaviour is in practice often negligibly close to that of vacuum
- in soft magnetic materials the difference between B and J is negligible for most practical purposes, but in hard magnetic materials there is a significant difference
As a result, there is a plethora of names, for just four quantities: B, H, J, and M.
Multiplicity of names
In the literature, articles, books and websites on theoretical physics, engineering, and other sciences there are many names, with some examples listed in the table below (the list is not exhaustive), all referring the same physical quantities, with the only difference being the units between SI and CGS systems (which are related by strictly defined conversion factors).18)
| Example of H and B names | Examples of M and J names | ||
|---|---|---|---|
| H | B | M | J |
| magnetic field strength H 19) magnetic field intensity H 20) magnetic field H 21)22)23) field H 24) field H' 25) H-field strength 26) H-field 27) magnetization field strength H 28) magnetizing field strength H 29) magnetising force H 30) magnetic force H 31) intensity of magnetic force H 32) auxiliary field H 33) number of lines per square centimetre in air (H)34) | magnetic flux density B 35) magnetic field B 36)37)38) magnetic induction B 39) auxiliary field B 40)41) applied field B 42) field B 43) B-field 44) magnetisation B 45) internal magnetisation B 46) induction B 47) intensity of induction B 48) permeation B 49) magnetic field M 50) number of lines per square centimetre in the material (B)51) | magnetisation M 52) magnetic polarisation M 53) intensity of magnetization M 54) magnetization field M 55) induced magnetic field M 56) magnetization density M 57) field M 58) M-field 59) intrinsic magnetization M 60) | magnetic polarisation J 61) polarisation J 62) magnetic polarisation I 63) intrinsic flux density Bi 64) intrinsic induction Bi 65) intrinsic induction J 66) J-field 67) ferric induction Bi 68) ferritic induction (B-H) 69) intensity of magnetisation I 70) magnetisation I 71) intrinsic magnetization J 72) intensity of magnetisation J 73) |
Systems of units
There are several internationally used system of units, which include the electromagnetic units. The most popularly adopted are SI units, in the so-called “rationalised” metre-kilogram-second system (MKS). But there are at least four based on centimetre-gram-second system (CGS)74) In the previously used CGS system, the magnetic permeability μ was unitless75) and for free space it was mathematically true that μ = 1, so it could be written that B = H (because for free space the magnetisation term can be omitted).76)
Such notation is in itself confusing, because it makes more difficult to distinguish between the two different quantities, especially that the unit of B was gauss and of H was oersted, yet they could be equal to one another (in a similar sense as 1 inch = 25.4 mm). For instance, in the CGS system the intrinsic induction Bi (equivalent of polarisation J in the SI system) is defined as Bi = B - H (even though B is in the units of gauss and H in oersteds).77)
Such equality is no longer true in the currently used SI system, not least for the difference in units.
The CGS units are also used by convention, simply because of the historic reasons, especially in the area of permanent magnets, whose energies are often quoted in MGOe (mega-gauss-oersted).78)79)
The CGS units are still used in many applications in the USA, whereas Europe and other countries rely almost exclusively on the SI units.80) Interestingly, in some applications the performance is specified as a mixture of CGS (emu) and SI (tesla),81) and this is typical for this type of magnetometer used in physics experiments.
Advantages of the CGS system
In theoretical physics 82) the CGS units are continued to be used alongside the MKS units. The approach used in the CGS system has some advantages when performing certain electromagnetic calculations (e.g. lack of the 4·π factor in some equations), even though a distinction has to be made between “electrostatic” and “electromagnetic” CGS units.83)
Advantages of the SI system
The magnetic quantities B, H, M, J, as well as μ0 use specific units which are easier to follow and thus there is a less chance of confusion when performing engineering-like calculations.
Definitions of B and H
The concept of magnetic field is fundamental in physics, but it is difficult to define - in the same sense it is it difficult to define what is “time”. Therefore, the definitions of magnetic field, magnetic field strength $H$ and magnetic flux density $B$ are usually somewhat convoluted or even circular, as shown in some examples from important literature, as cited below.
| Publication | Definition of magnetic field | Definition of magnetic field strength $H$ | Definition of magnetic flux density $B$ |
|---|---|---|---|
| R. Feynman, R. Leighton, M. Sands The Feynman Lectures on Physics84) | First, we must extend, somewhat, our ideas of the electric and magnetic vectors, E and B. We have defined them in terms of the forces that are felt by a charge. We wish now to speak of electric and magnetic fields at a point even when there is no charge present. We are saying, in effect, that since there are forces “acting on” the charge, there is still “something” there when the charge is removed. | We choose to define a new vector field H by $$\mathbf{H} = \mathbf{B} − \frac{\mathbf{M}}{ε_0 c^2} $$ […] Most people who use the mks units have chosen to use a different definition of H. Calling their field H' (of course, they still call it H without the prime), it is defined by $$\mathbf{H'} = ε_0 c^2\mathbf{B} − \mathbf{M}$$ Also, they usually write $ε_0 c^2$ as a new number 1/μ0 | We can write the force F on a charge q moving with a velocity v as $$\mathbf{F} = q(\mathbf{E} + \mathbf{v} × \mathbf{B})$$ We call E the electric field and B the magnetic field at the location of the charge. |
| Richard M. Bozorth Ferromagnetism85) | A magnet will attract a piece of iron even though the two are not in contact, and this action-at-a-distance is said to be caused by the magnetic field, or field of force. | The strength of the field of force, the magnetic field strength, or magnetizing force H, may be defined in terms of magnetic poles: one centimeter from a unit pole the field strength is one oersted. | Faraday showed that some of the properties of magnetism may be likened to a flow and conceived endless lines of induction that represent the direction and, by their concentration, the flow at any point. […] The total number of lines crossing a given area at right angles is the flux in that area. The flux per unit ara is the flux density, or magnetic induction, and is represented by the symbol B. |
| David C. Jiles Introduction to Magnetism and Magnetic Materials86) | One of the most fundamental ideas in magnetism is the concept of the magnetic field. When a field is generated in a volume of space it means that there is a change of energy of that volume, and furthermore that there is an energy gradient so that a force is produced which can be detected by the acceleration of an electric charge moving in the field, by the force on a current-carrying conductor, by the torque on a magnetic dipole such as a bar magnet or even by a reorientation of spins of electrons within certain types of atoms. | There are a number of ways in which the magnetic field strength H can be defined. In accordance with the ideas developed here we wish to emphasize the connection between the magnetic field H and the generating electric current. […] The simplest definition is as follows. The ampere per meter is the field strength produced by an infinitely long solenoid containing n turns per metre of coil and carrying a current of 1/n amperes. | When a magnetic field H has been generated in a medium by a current, in accordance with Ampere's law, the response of the medium is its magnetic induction B, also sometimes called the flux density. |
| Magnetic field, Encyclopaedia Britannica87) | Magnetic field, region in the neighbourhood of a magnetic, electric current, or changing electric field, in which magnetic forces are observable. | The magnetic field H might be thought of as the magnetic field produced by the flow of current in wires […]88) | […] the magnetic field B [might be thought of] as the total magnetic field including also the contribution made by the magnetic properties of the materials in the field.89) |
| E.M. Purcell, D.J. Morin, Electricity and magnetism90) | This interaction of currents and other moving charges can be described by introducing a magnetic field. […] We propose to keep on calling $\mathbf{B}$ the magnetic field. | If we now define a vector function $\mathbf{H}(x, y, z)$ at every point in space by the relation $$ \mathbf{H} \equiv \frac{\mathbf{B}}{μ_0} - \mathbf{M} $$ […] As for $\mathbf{H}$, although other names have been invented for it, we shall call it the field $\mathbf{H}$, or even the magnetic field $\mathbf{H}$. | […] any moving charged particle that finds itself in this field, experiences a force […] given by $$ \mathbf{F} = q·\mathbf{E} + q·\mathbf{v} × \mathbf{B} $$ […] We shall take the equation as the definition of $\mathbf{B}$. |
Explanation of B, H, J, and M
S. Zurek, E-Magnetica.pl, CC-BY-4.0
All matter contains vacuum between and even inside atoms. Electrons exhibit magnetic dipole moments which have unit of A·m2. These intrinsic magnetic moments can interact with the applied field, and under certain conditions also between themselves.
Additionally, an electron orbiting around the nucleus constitutes a lossless loop of electric current (in A) and with area of orbit (in m2), whose product is also equivalent to a magnetic moment. Also a macroscopic electric current can be equivalent to magnetic magnetic moment.
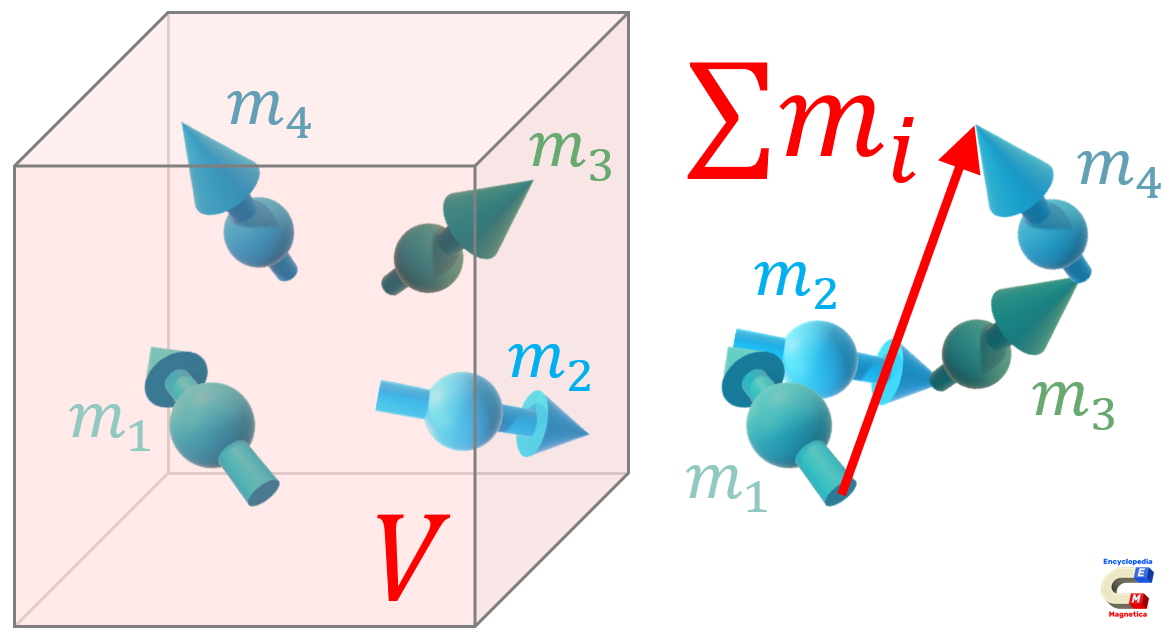
Magnetisation M is the vector sum of all individual intrinsic magnetic moments (A·m2) per unit volume (m3), giving the unit for volume magnetisation as A/m. Magnetic polarisation J (T) is M scaled by the magnetic constant: $J = μ_0 · M$. They are both equivalent and the choice is just the matter of convenience.
Combination of all of these effects generates magnetic responses with respect to the external or applied magnetic field, which lead to six main classes of behaviour:
- vacuum (same as applied field)
- diamagnetic (weak negative response)
- paramagnetic (weak positive response)
- antiferromagnetic (ordered, but weak response, macroscopically equivalent to paramagnets)
- ferromagnetic (ordered, very strong response)
- superconducting (non-magnetic, but strong negative response).
In vacuum

S. Zurek, E-Magnetica.pl, CC-BY-4.0
In vacuum there are is no matter, so there are no magnetic moments, therefore M is precisely zero. Magnetic polarisation J is always M scaled by the permeability of vacuum so in vacuum J is also precisely zero.
Regardless what is the source of magnetic field, in vacuum B and H are always precisely parallel (co-linear) and proportional by the factor of vacuum permeability. Therefore, either can be used for any calculations.
| B, H, M and J in vacuum | ||
|---|---|---|
| (1a) | $$\vec{B} = μ_0 · \vec{H} $$ | (T) |
| (1b) | $$\vec{H} = \frac{\vec{B}}{μ_0}$$ | (A/m) |
| (1c) | $$\vec{M} = 0$$ | (A/m) |
| (1d) | $$\vec{J} = μ_0 · \vec{M} = 0$$ | (T) |
| where: $μ_0$ - permeability of vacuum (H/m) | ||
In vacuum B and H have a precisely linear relationship so if one is known then the other can be easily calculated. Such notation could suggest that the distinction might not be significant enough to differentiate between the two quantities. However, the distinction has to be made even on the basis of the units. This is similar as in the Ohm's law - where the resistance R in ohms is the proportionality factor between DC voltage V in volts and DC current I in amperes. The units are different, because the quantities are different, even though both quantities are linked through a seemingly simple multiplication factor.
In matter
In matter there are intrinsic magnetic dipole moments of atoms, which respond to the external magnetic field applied to the material.
| B, H, M and J in “non-magnetic matter” (diamagnetic, paramagnetic, antiferromagnetic) |
||
|---|---|---|
| (2a) | $$\vec{B} = μ_0 · ( \vec{H} + \vec{M} )$$ $$\vec{B} = μ_0 · \vec{H} + \vec{J}$$ $$\vec{B} = μ_0 · (1 + χ_m) · \vec{H}$$ $$\vec{B} = μ_0 · μ_r · \vec{H}$$ | (T) |
| (2b) | $$\vec{H} = \frac{\vec{B}}{μ_0} - \vec{M}$$ | (A/m) |
| (2c) | $$\vec{M} = \frac{\vec{B}}{μ_0} - \vec{H}$$ $$\vec{M} = χ_m · \vec{H} $$ | (A/m) |
| (2d) | $$\vec{J} = \vec{B} - μ_0 · \vec{H} $$ $$\vec{J} = μ_0 · \vec{M} $$ | (T) |
| where: $μ_0$ - permeability of vacuum (H/m) | ||
Three main classes of response can be distinguished: diamagnetic, paramagnetic (both are commonly referred to as “non-magnetic”) and ordered (ferromagnetic, ferrimagnetic - both showing strong magnetic effects).
The equations (2 a,b,c,d) apply for all “non-magnetic” materials, but the value of χ can take negative or positive values.
Using the engineering approach, H (always measured in A/m) can be thought of as the applied field, and M (in A/m) or J (in T) as the response of the material. The total field, combining of the affects is B (always measured in T). As in vacuum, the permeability of vacuum is used to “convert” between the quantities and units between the dimensions of A/m and T.
In diamagnets the internal magnetic moments are paired (e.g. two electrons on each orbital) cancelling each other within each atom in such a way that there is no net magnetic moment without external magnetic field. The application of external field means a change in that field (from zero to some non-zero value), and conceptually speaking, this process can “induce current” by changing size of the orbit or changing the speed of orbiting electrons. Due to Lenz's law such induced current would always oppose the cause, so the resulting induced magnetisation M will always oppose the applied field.91)
In paramagnets each atom contributes at least one unpaired electron, but due to thermal agitation they all point in random directions, thus cancelling for the whole volume, not creating any net magnetisation. Once the magnetic field is applied these moments tend to align with the field, adding up to some vectorial value, pointing in the same direction as the excitation, so that the combined effect is greater than the applied field.
Some paramagnets come become “ordered” at lower temperatures.


In magnetically “ordered” materials, each atom also contributes at least one unpaired electron, but they are close enough to each other so that they interact, spontaneously forming an ordered structure, in effect magnetically saturating the material within some small volume, in some energetically preferable direction, for example dictated by the crystal structure of the material. Hence, magnetisation M (equivalent to magnetic polarisation J) arises spontaneously, even without applying some external field.
If an external field H is applied, it can be at a different direction to the internal alignment of the polarisation J, and thus the two vectors do not have to be aligned, with their vectorial sum B pointing as dictated by the rules of vector summation.
For magnetically soft materials, especially in engineering applications the more common notation is to use permeability μ rater than susceptibility χ, but otherwise the equations are the same as (2 a,b,c,d).92)93)94)
All “ordered” materials become paramagnetic at sufficiently high temperatures.
At higher temperatures, such that superconductors are normal conductors, they are non-magnetic (depending on the material: para- or dia-). Below the critical temperature they become superconducting and expel magnetic field from their volume (Meissner effect) and it is said that they become perfect diamagnets (with χ = -1, or μr = 0). However, this is not due to the electron magnetic moments responding the the magnetic field, but instead due to macroscopic superconducting currents Isup flowing on the surface. It is customary then to express the effect of these currents by magnetisation Msup which precisely opposes the applied field.95)
However, it could be equally said that such current generates an opposing magnetic field strength Hsup due to Ampere's circuital law, because the same result is achieved by calculating $H_{sup} = N·I_{sup} / l$ (where $l = V/A$, and then Hsup = Msup having the same units). M was previously used for summation of intrinsic magnetic moments, not those create at a macroscopic scale. The distinction is somewhat artificial in this case, because both approaches give the same result (M and H have the same units).


Summary of equations
| General field | Field related to magnetised matter | Material property | |||
|---|---|---|---|---|---|
| $B$ (T) magnetic flux density (magnetic induction, magnetic field) | $H$ (A/m) magnetic field strength (magnetic field, magnetic field intensity) | $J$ (T) magnetic polarisation (intrinsic flux density, intrinsic induction, ferric induction) | $M$ (A/m) magnetisation (magnetic polarisation) | $μ_r$ (unitless) relative permeability | $χ$ (unitless) susceptibility |
| in matter: | |||||
| $$B = μ_r · μ_0 · H$$ $$B = μ_0 · ( H + M )$$ $$B = μ_0 · H + μ_0 · M$$ $$B = μ_0 · H + J$$ | $$H = \frac{B}{μ_0} - M$$ | $$J = μ_0 · M$$ $$J = B - μ_0 · H$$ | $$M = χ · \frac{B}{μ_0}$$ $$M = \frac{B}{μ_0} - H$$ | $$μ_r = χ + 1$$ $$μ_r = \frac{B}{μ_0 · H}$$ | $$χ = \frac{μ_0·M}{B}$$ $$χ = μ_r - 1$$ |
| in vacuum: | |||||
| $$B = μ_0 · H$$ | $$H = \frac{B}{μ_0}$$ | $$J = 0$$ | $$M = 0$$ | $$μ_r = 1$$ | $$χ = 0$$ |
| $μ_0$ = 4·π·10-7 (H/m) is the permeability of vacuum, $μ = μ_r · μ_0$ (H/m) is the permeability of the given material | |||||
Generation of H

S. Zurek, E-Magnetica.pl, CC-BY-4.0
Electric current I produces around itself magnetic field strength H, whose amplitude is independent of the type of a continuous isotropic medium (regardless if it is non-magnetic, magnetic, non-linear, etc.)96)
For an infinitely long straight round wire it is:
| (4) | $$ H = \frac{I}{2 ⋅ \pi ⋅ r} $$ | (A/m) |
where: r - radius of a circle enclosing the current I, π - the mathematical constant.
For other geometries of conductors (current loop, solenoid, Helmholtz coil etc.) the value of H can be calculated from the Ampere's circuital law or from Biot-Savart law.97)98)